This page collects all demo videos that shows TILT!Audio running on different machines. All these video are also available on my youtube channel
More on youtube: just search for tiltaudio.
Best audio for your pinball machine

This page collects all demo videos that shows TILT!Audio running on different machines. All these video are also available on my youtube channel
More on youtube: just search for tiltaudio.
A few notes on the assembly of the latest boards rev 2.8 and 3.0
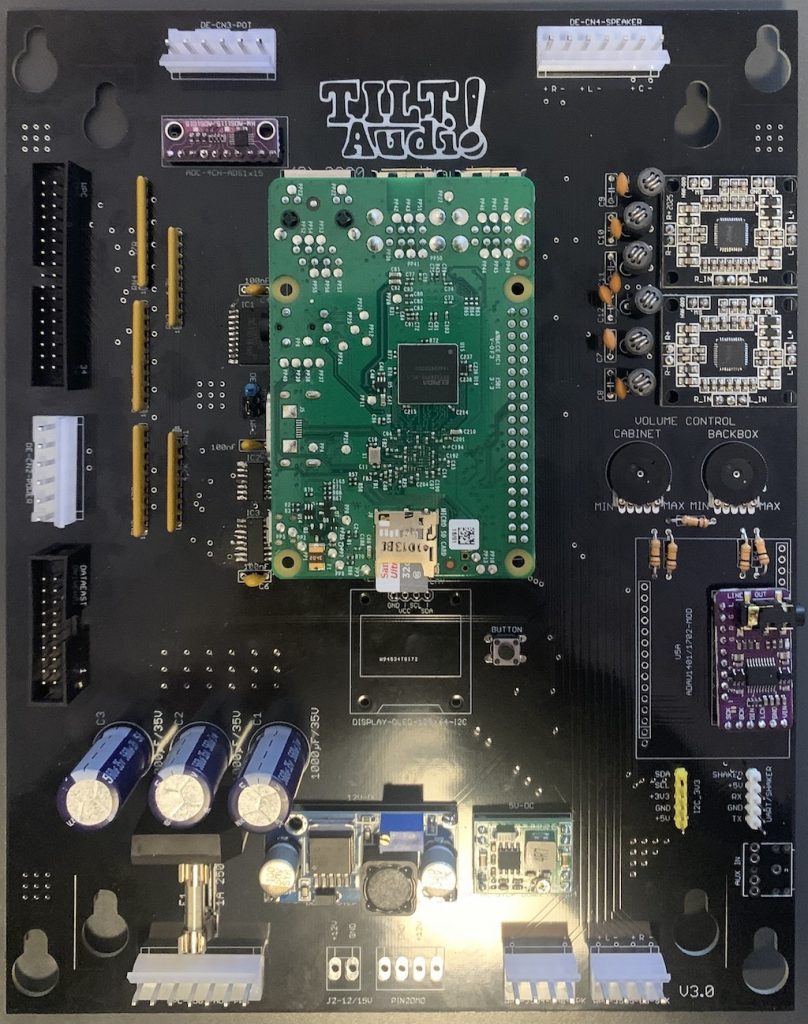
The picture shows a fully populated board for both data east and WPC.
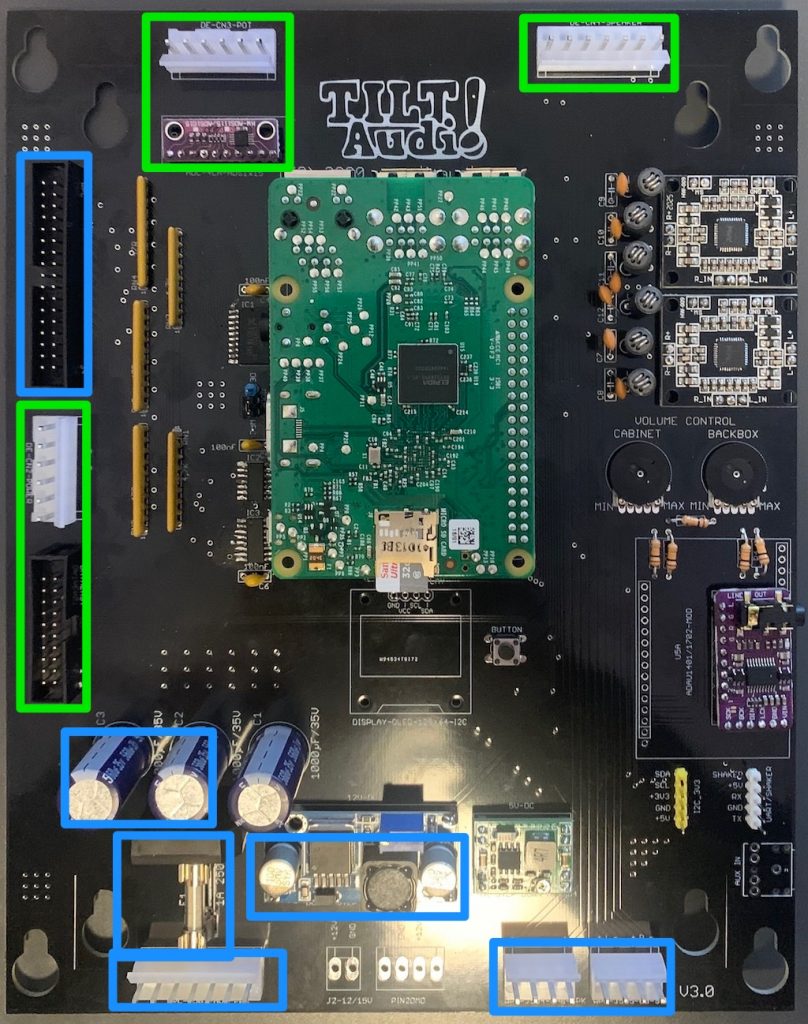
Same picture but highlighted in green what is data east (whitestar) only, highlighted in blue what is wpc only.
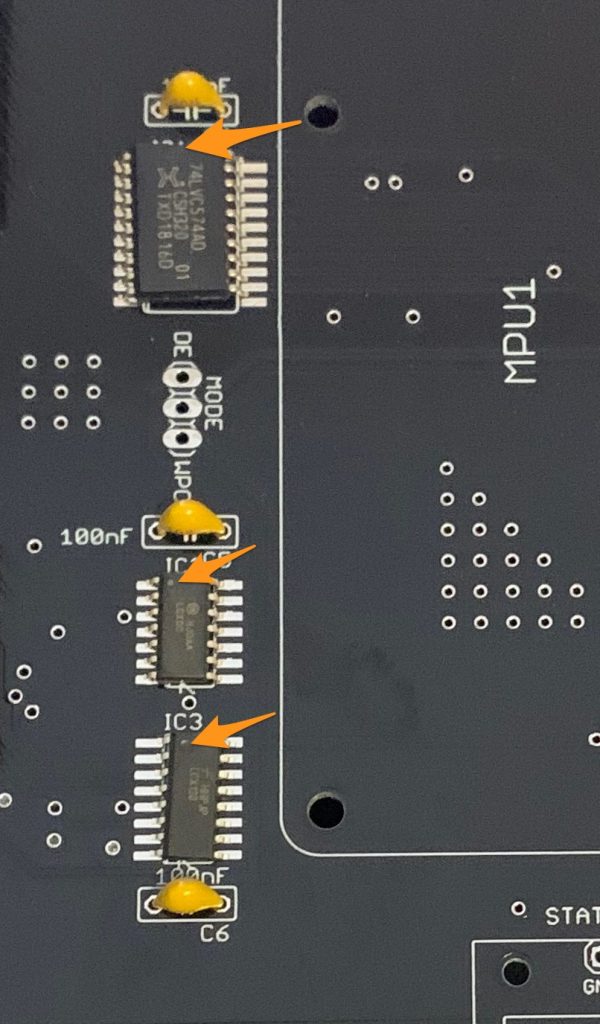
From the label on the PBC it should be clear, how to mount the parts. But for some there is different orientation possible or it is not clear where to place pin1.
RN1 / RN2: these are resistor networks used as pull up so there is a pin1 connected to 5v.
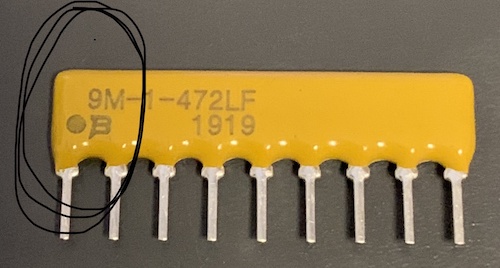
Resistor network pin1 marking must match the orange arrows see picture below.
If you use double row header with polarization slot, be sure it point to the right direction (34 to edge of pcb, 20 to inner pcb, see arrows
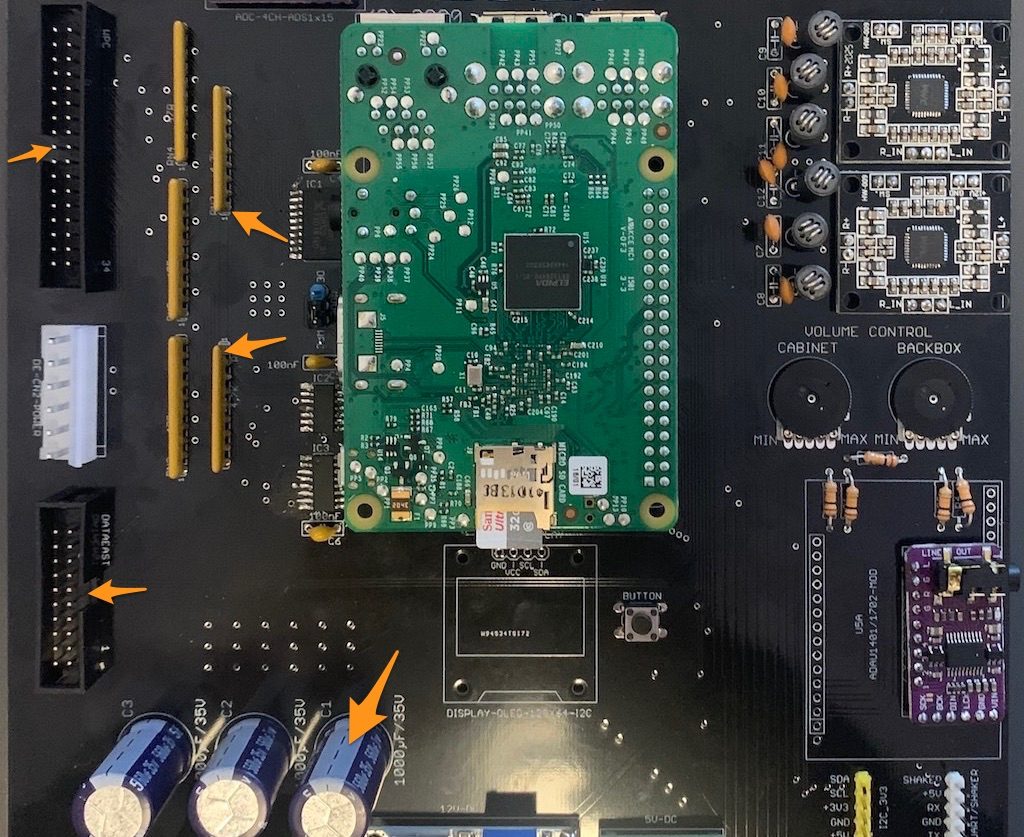
Also note the gnd side (upper side in this picture) for the e-caps.
Last but not least the smd ICs all have their pin1 upper left. You will notice the small dot in the upper left corner (resp the notch for the 574)
The dc dc power converter modules are sometimes with fixed voltage 12v / 5v sometimes adjustable. If you got the adjustable one, don’t worry I have already adjusted them to 5v or 12v resp. So no need to do anything on your side. If you accidentally push one of the trimmers, you need to carefully readjust to 5v or 12v to not risk to fry the raspberry pi or the amplifiers.
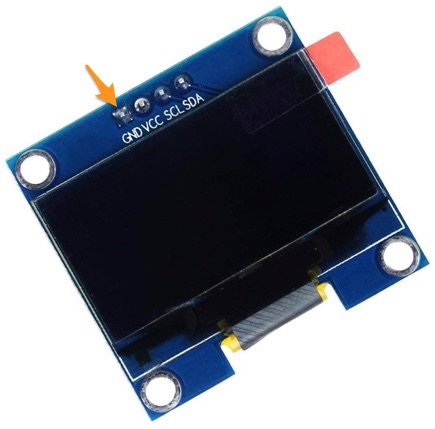
One more comment on the OLED display: you can always add one on your own if you did not include one in your order in the first place. Two type are supported: 0.96” with SSD1306 controller and 1.3” with SH1106 controller. Just be sure that you buy one with the power connectors starting with Gnd, Vcc, … from left to right. I’m mentioning this because you get different ones as well. Best fit would be for example: https://www.amazon.de/DollaTek-seriell-SSH1106-Display-LCD-Modul/dp/B07QJW9FHJ. It has the Gnd connector on the left, so it will work fine.
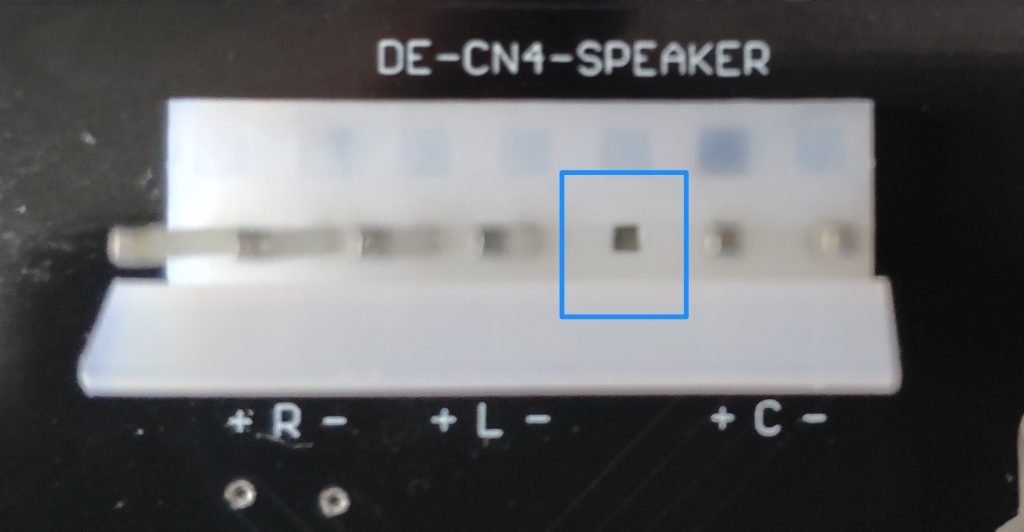
Old wpc games only have a mono sound with 3 speakers wired like this:
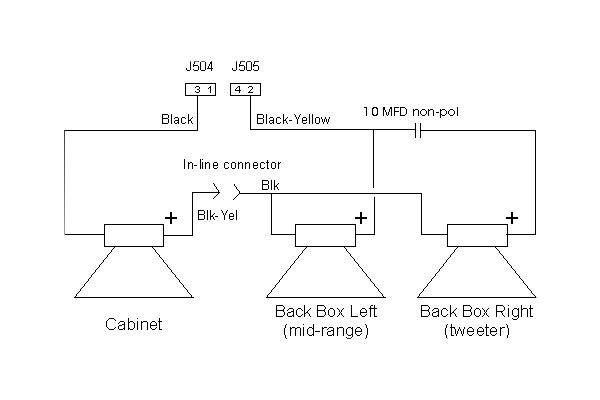
With TILT!Audio you get full stereo plus sub woofer channel for the cabinet speaker (2.1 sound). Therefore the speaker wiring needs to change:
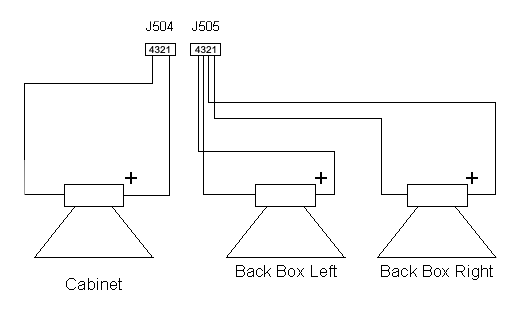
As the backbox right speaker in such games is only a tweeter, I would strongly recommend to also exchange speakers in the backbox.
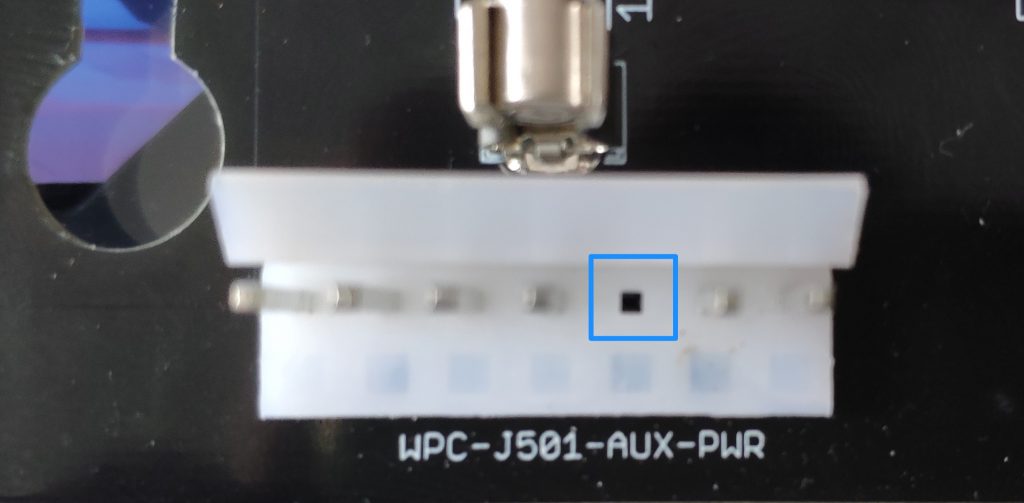
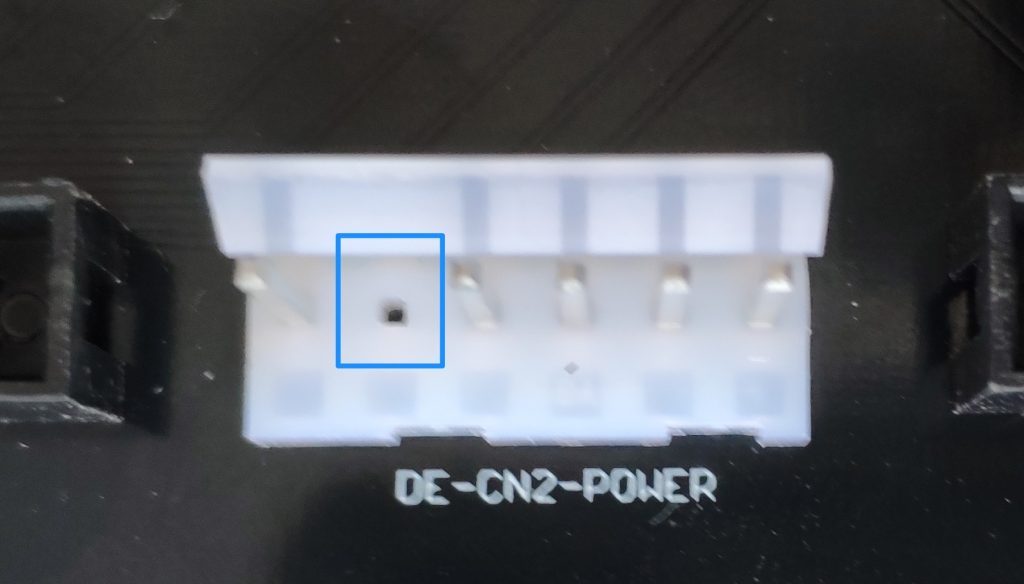
3 of the molex connectors have a key pin (a pin that needs to be removed). It is easy to remove it before soldering. See images below which pin to remove:
Some general advice and hints:
Images courtesy of Mike L. Very much appreciated.
If you have a good linux experience it is easy to create a bootable sd card for TILT!Audio with arbitrary size.
For everybody else just use the standard method and flash the standard image with etcher.
Just use a normal micro sd card if size 8GB, 16GB or 32GB. These normally come with just one big fat32 formatted partition. TILT!Audio uses the fat32 partition not only for booting, but also as storage for sound packages.
What you need to do is create some space after the fat32 partition for the linux part. In Ubuntu you can just use parted or gparted to shrink the fat32 partition to a smaller size that leaves about 4GB unassigned space.
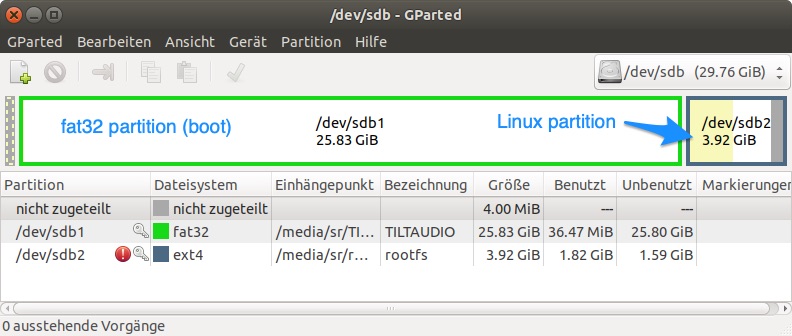
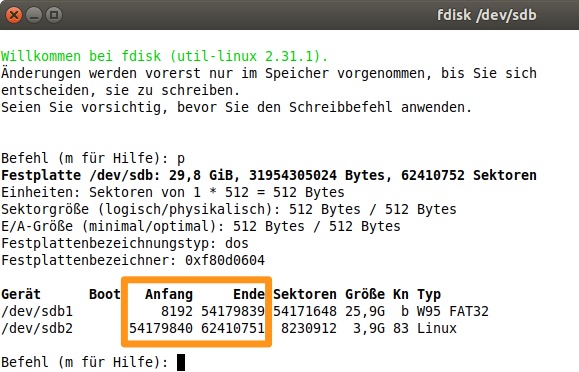
After that use fdisk to create a second primary partition (linux type) that starts right after the fat32 partition. Just check the end block that fdisk displays for the first partition and add 1 block.
Such a prepared micro sd card then can be filled with data:
Creating your TILT!Audio sd card this way is much faster than flashing a 16GB image and you can choose what size of sd card to use.